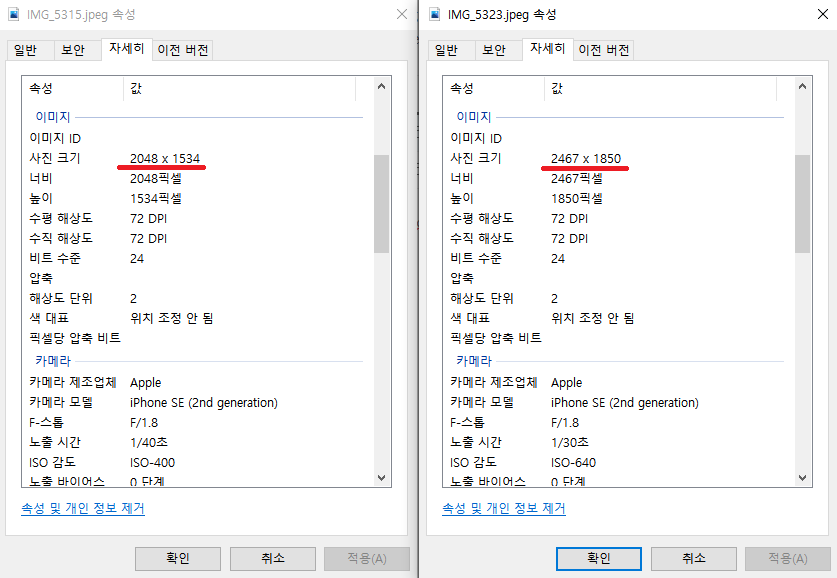
아이폰 카메라 포맷을 높은 호환성 Most Compatible 으로 설정하여 사용하는게 좋다.
< 고효율성+기본(가장 호환성 높음) vs 높은 호환성+기본(가장 호환성 높음) >
센드애니웨어 Send Anywhere
포멧
센드애니웨어 Send Anywhere
고효율성 High Efficiency (heic)
수정된 해상도 반영 jpg 포멧
높은 호환성 Most Compatible (jpeg)
수정된 해상도 반영 jpg 포멧 iCloud 기본 옵션과 Binary 수준에서 완전 동일
< 센드애니웨어 Send Anywhere >
고효율성 High Efficiency 으로 설정되어 있어도 수정된 해상도를 반영하여 jpeg 로 변환하여 다운로드 되며, 높은 호환성 Most Compatible 으로 설정 된 경우 iCloud 와 동일한 파일로 다운로드 된다. 보안이 좀 걱정되긴 하지만 센드애니웨어 짱!
$ ## CAN Interface 인식 확인
$ ls -al /sys/class/net
$ ifconfig can0
$ ## bitrate 설정 및 활성화 : can0, 250000 bps
$ ip link set can0 up type can bitrate 250000
$ ## or
$ ip link set can0 type can bitrate 250000
$ ifconfig can0 up
## 모든 Interface 의 모든 데이터 출력
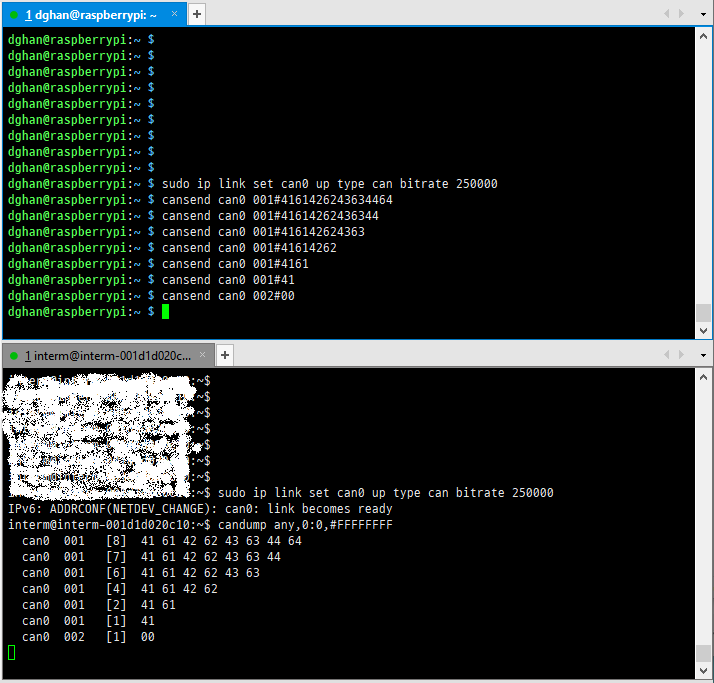
$ candump any,0:0,#FFFFFFFF
## can0 / can1 로 수신된 모든 데이터 출력
$ candump can0,0:0,#FFFFFFFF
$ candump can1,0:0,#FFFFFFFF
모든 Interface 의 모든 데이터 출력
$ candump any,0:0,#FFFFFFFF
can0 / can1 로 수신된 모든 데이터 출력
$ candump can0,0:0,#FFFFFFFF
$ candump can1,0:0,#FFFFFFFF
$ cat ./PetaLinuxProject/subsystems/linux/configs/device-tree/pcw.dtsi
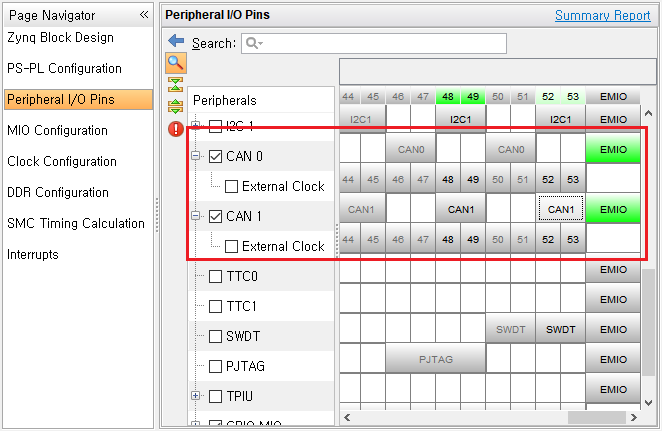
can0 {
status = "okay";
};
can1 {
status = "okay";
};
But, CAN Interface 가 정상적으로 활성화 되지 않음!!!
$ ip link set can0 up type can bitrate 250000
xilinx_can e0008000.can can0: bitrate error 0.0%
A link change request failed with some changes committed already. Interface can0 may have been left with an inconsistent configuration, please check.
RTNETLINK answers: No such device
Zynq 내장 CAN Controller 는 알수없는 이유로 Interface 가 활성화 되지 않는다.
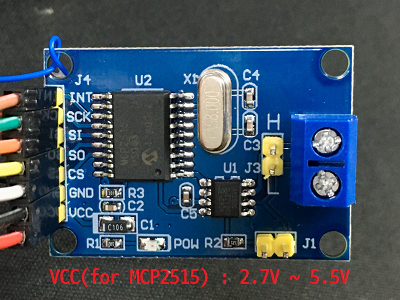
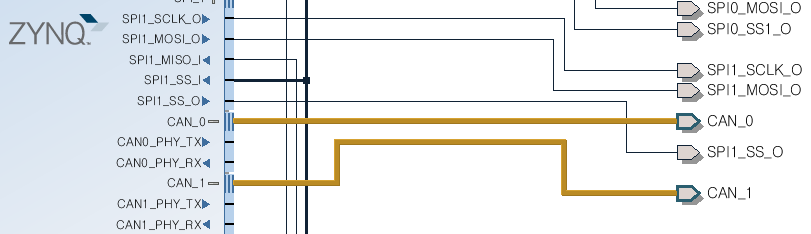
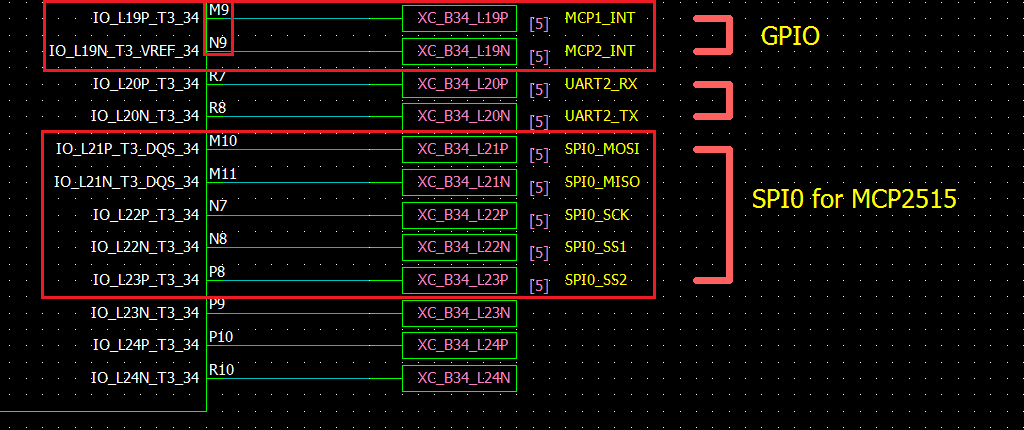
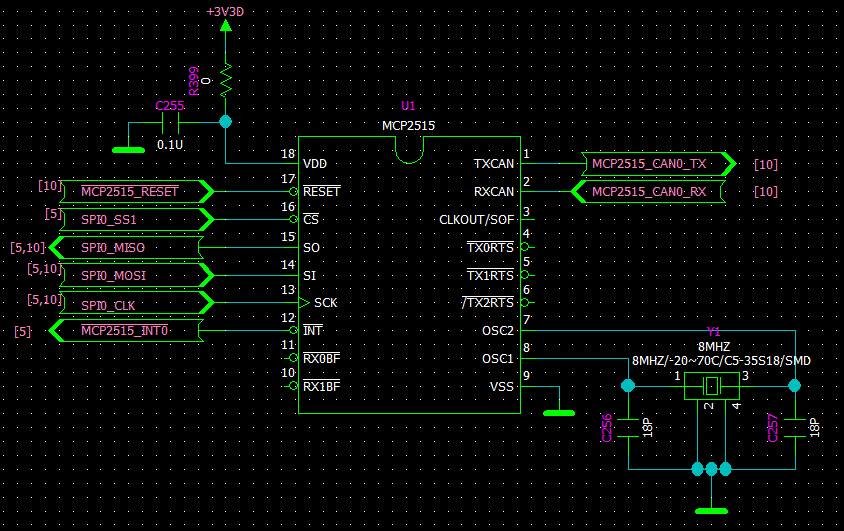
MCP2515 의 Interrupt Pin 을 Zynq 의 Interrupt-Controller (IRQ_F2P) 에 연결시, Zynq SPI (Shared Peripheral Interrupts) 의 Edge Type 설정 제약으로 사용 불가 MCP2515 는 Falling Edge 만 지원
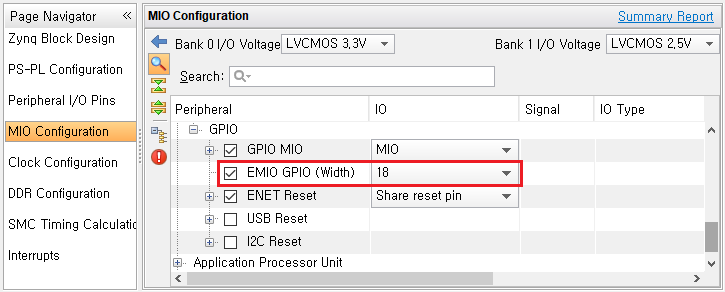
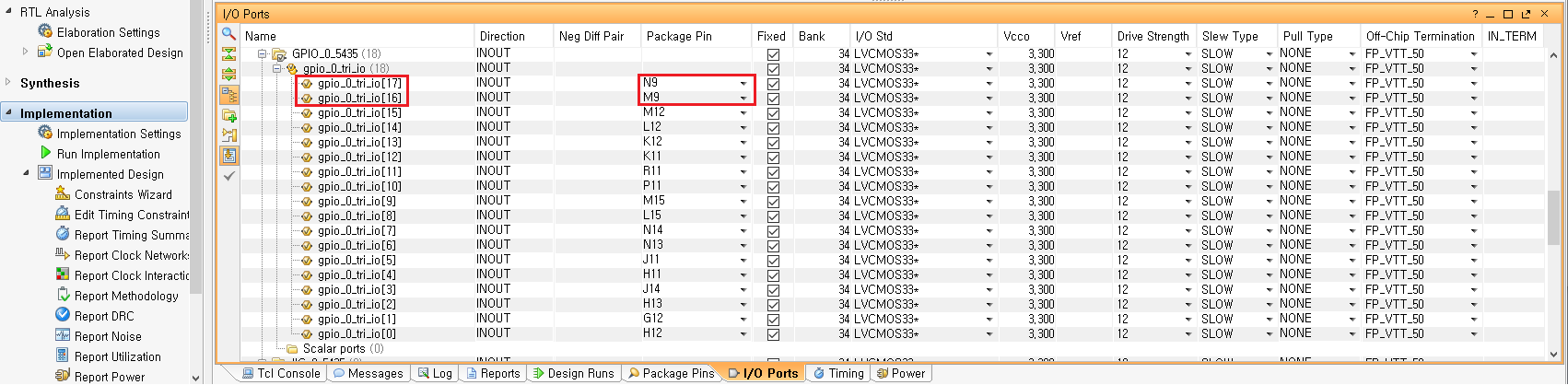
Interrupt Pin 을 Zynq 의 EMIO(GPIO) 로 연결 후 에러없이 CAN Interface 가 활성화 됨 $ ip link set can0 up type can bitrate 250000
테스트용 ZIG 와는 통신이 되지 않음 메세지를 한번 보냈으나 SPI 신호는 꽤 오랜시간동안 반복(Retry) 후 멈춘다. 추가로 메세지를 보낼 경우 송신 버퍼 에러가 발생 한다. 임시로 송신 버퍼 크기 늘리면 에러는 사라진지만, 송신이 안되고 있는 근본 문제는 여전 하다. $ sudo ifconfig can0 txqueuelen 1000
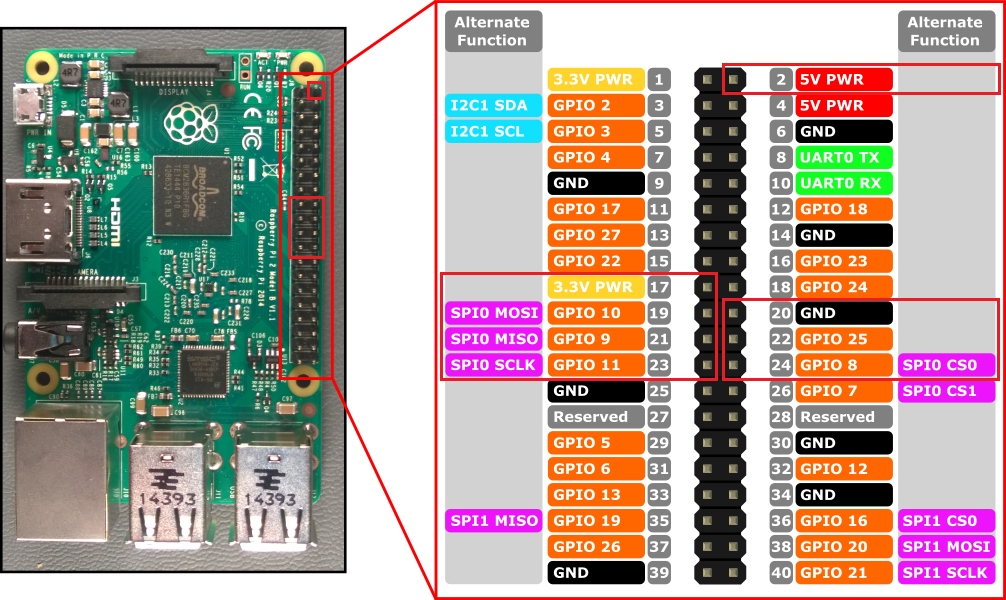
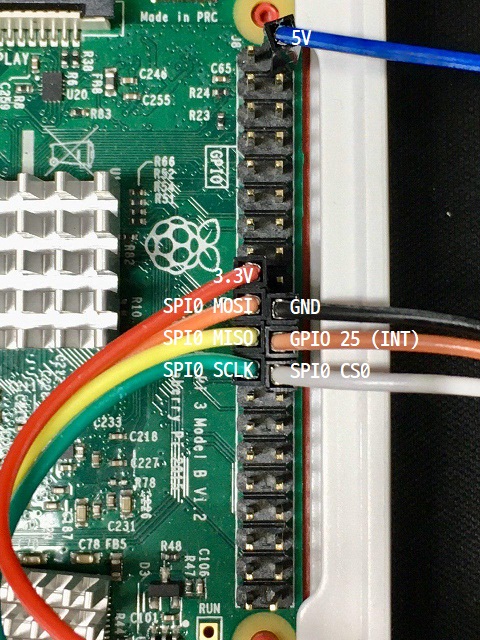
Raspberry Pi 에 MCP2515 Module 을 적용한 장치와는 통신이 잘 된다.
테스트용 JIG 에 종단저항 (120 옴) 추가 후 통신이 잘 된다.
회선이 불안정 하여 Retry 하다 멈춘 경우, CAN Interface 를 재설정 (down / up) 해주어야 복구가 된다.
개발중인 장비에 사용중인 eMMC 의 ECSD Register Field Parameters 를 확인 하고 싶은데 이건 어찌해야 하나…?
The 512-byte extended card-specific data (ECSD) register Hardware reset function : [162] Byte | 00h he host can change the properties of modes segments using the SWITCH command.